 Cookie preferences
Cookie preferences
Active filters
LATEST NEWS






MAGNETOMETER SEASPY2

SeaSPY2 is a reliable high sensitivity magnetometer with unmatched absolute accuracy.






SHIPEK GRAB

This hefty center-pivot sampler is designed to sample unconsolidated sediments from soft ooze to hard-packed silts from deep lakes and near offshore. It brings up virtually un- disturbed, unwashed samples to the surface from any depth.
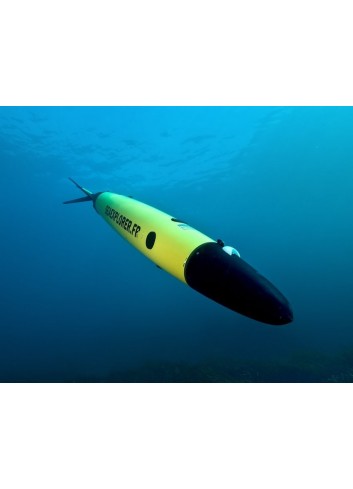

SEAEXPLORER

The SEAEXPLORER moves through water by varying its buoyancy, allowing it to achieve long-term performance and stealth performance. He regularly returns to the surface to transmit information to the operator, in particular his position, the mission in progress, etc.




AUV ECA A-9E

A9-E is the configuration of the autonomous autonomous vehicle A9 of the ECA group, AUV, for environmental monitoring. In addition to acquiring images of the seabed, it will record bathymetric data as well as environmental information such as water turbidity, conductivity, temperature, fluorescence, dissolved oxygen or pH. Mission planning and tracking is done through user-friendly software that lets you track the vehicle at all times during your mission.

AUV A18S
A18-S is the 3D image sonar configuration of the A18 autonomous underwater vehicle of the ECA Group. This AUV is designed to develop precision 3D inspections of the seabed. It is deployed from a surface vessel and an LARS allowing automatic recovery can be used. The vehicle operates autonomously at depths of 300 meters with 21 hours of battery life and is easy to transport by plane.


AUV A18D
A18-D is the mid-size autonomous underwater vehicle of the ECA, AUV group for deep water applications. It is dedicated to the precise exploration of the seabed in 3D. It performs autonomous missions from a depth of 3000 m for up to 21 hours and is easy to transport by plane for missions abroad. This system can be delivered with an LARS which enables automatic underwater recovery and Triton Imaging software applications for further data processing.